










Humanoid Robot
Abstract

Papers
-
SOINN-Robot (HIRO)

-
木村 大毅, 西村 竜太朗, 小黒 陽弘, 長谷川 修: ネットから学習し未知物体を推定する超高速マルチモーダル・オンライン転移学習, 第18回 ロボティクスシンポジア, 2013
ABSTRACT
To build an intelligent robot, we have to develop an autonomous mental development system that incrementally and speedily learns from humans, its environments, and the Internet. Therefore, we propose an ultra-fast, multimodal, and online incremental transfer learning method using STAR-SOINN(STAtistical Recognition - Self-Organizing and Incremental Neural Networks). We conducted a comparison experiment to evaluate our method. The result suggests that the recognition accuracy is higher than the system that simply adds the modalities. In addition, the proposed method can work very fast (approximately 1 second to learn one object, 25 milliseconds for a single recognition). And it could estimate attributes of "unknown" objects by transferring attribute information of known objects. Finally, we discuss that this system potentially becomes the base technology for future robots. -
Daiki Kimura, Ryutaro Nishimura, Akihiro Oguro, and Osamu Hasegawa : Ultra-fast Multimodal and Online Transfer Learning on Humanoid Robots, ACM/IEEE International Conference on Human-Robot Interaction, 2013 [ACM Library]
ABSTRACT
To build an intelligent robot, we must develop an autonomous mental development system that incrementally and speedily learns from humans, its environments, and electronic data. This paper presents an ultra-fast, multimodal, and online incremental transfer learning method using the STAR-SOINN. We conducted two experiments to evaluate our method. The results suggest that recognition accuracy is higher than the system that simply adds modalities. The proposed method can work very quickly (approximately 1.5[s] to learn one object, and 30[ms] for a single estimation). We implemented this method on an actual robot that could estimate attributes of "unknown" objects by transferring attribute information of known objects. We believe this method can become a base technology for future robots.
-
木村 大毅, 西村 竜太朗, 小黒 陽弘, 長谷川 修: ネットから学習し未知物体を推定する超高速マルチモーダル・オンライン転移学習, 第18回 ロボティクスシンポジア, 2013
-
HOAP
-
Naoya Makibuchi, Furao Shen and Osamu Hasegawa : Online Knowledge Acquisition and General Problem Solving in a Real World by Humanoid Robots Proc. ICANN 2010, Lecture Notes in Computer Science, Springer, pp. 551-556, Vol. 6354, 2010 [PPT
 ]
ABSTRACT
]
ABSTRACT
In this paper, the authors propose a three-layer architecture using an existing planner, which is designed to build a general problem-solving system in a real world. A robot, which has implemented the proposed method, forms the concepts of objects using the Self-Organizing Incremental Neural Network, and then acquires knowledge, online and incrementally, through interaction with the environment or with humans. In addition, it can solve general-purpose problems in a real world by actively working with the various acquired knowledge using the General Problem Solver. In the experiment, the authors show that the proposed method is effective for solving general-purpose problems in a real world using a humanoid robot. -
巻渕有哉、申富饒、長谷川修、”ヒューマノイドによる発達的一般問題解決と常識の獲得”、第28回日本ロボット学会学術講演会、(2010) [PDF
 , PPT]
ABSTRACT
, PPT]
ABSTRACT
In this paper, we propose an intelligent architecture that meets all the properties required for the Autonomous Mental Development. In addition, we argue about a mechanism for robots to acquire and manage common sense. -
巻渕有哉,申富饒,長谷川修:"実世界における一般問題解決システムの提案とそのヒューマノイドロボットへの実装",電子情報通信学会論文誌D,Vol.J93-D, No.6, pp960-977, (2010) [PDF]
ABSTRACT
本論文では,実世界における一般問題解決システムの構築を目的とし,既存のプランナを利用した3層構造のアーキテクチャを提案する.提案手法は自己増殖型ニューラルネットワーク(SOINN)により物体の概念を形成し,また,環境や人間との相互作用を通じて知識をオンラインかつ追加的に獲得する.更に,獲得した複数の知識を一般問題解決器(GPS)により能動的に運用し,実世界における汎用的な問題解決が可能である.実験により,提案手法を実装したヒューマノイドロボットを用いて,提案手法が実世界における汎用のタスクに対して有効であることを示す.
-
Naoya Makibuchi, Furao Shen and Osamu Hasegawa : Online Knowledge Acquisition and General Problem Solving in a Real World by Humanoid Robots Proc. ICANN 2010, Lecture Notes in Computer Science, Springer, pp. 551-556, Vol. 6354, 2010 [PPT
-
IKR1
-
Xiaoyuan He, Ryo Kojima and Osamu Hasegawa : "Developmental Word Grounding through A Growing Neural Network with A Humanoid Robot"
 , IEEE Trans. SMC-Part B, Vol.37, No.2, pp.451-462, (2007)
ABSTRACT
, IEEE Trans. SMC-Part B, Vol.37, No.2, pp.451-462, (2007)
ABSTRACT
This paper presents an unsupervised approach of integrating speech and visual information without using any prepared data. The approach enables a humanoid robot, Incremental Knowledge Robot 1 (IKR1), to learn word meanings. The approach is different from most existing approaches in that the robot learns online from audio-visual input, rather than from stationary data provided in advance. In addition, the robot is capable of learning incrementally, which is considered to be indispensable to lifelong learning. A noise-robust self-organized growing neural network is developed to represent the topological structure of unsupervised online data. We are also developing an active-learning mechanism, called "desire for knowledge", to let the robot select the object for which it possesses the least information for subsequent learning. Experimental results show that the approach raises the efficiency of the learning process. Based on audio and visual data, they construct a mental model for the robot, which forms a basis for constructing IKR1's inner world and builds a bridge connecting the learned concepts with current and past scenes. -
Xiaoyuan He, Tomotaka Ogura, Akihiro Satou and Osamu Hasegawa, "Developmental Word Acquisition And Grammar Learning by Humanoid Robots through A Self-Organizing Incremental Neural Network", IEEE Trans. SMC-Part B, Vol.37, No.5, pp.1357-1372, (2007)
ABSTRACT
We present a new approach for online incremental word acquisition and grammar learning by humanoid robots. Using no data set provided in advance, the proposed system grounds language in a physical context, as mediated by its perceptual capacities. It is carried out using show-and-tell procedures, interacting with its human partner. Moreover, this procedure is open-ended for new words and multiword utterances. These facilities are supported by a self-organizing incremental neural network, which can execute online unsupervised classification and topology learning. Embodied with a mental imagery, the system also learns by both top-down and bottom-up processes, which are the syntactic structures that are contained in utterances. Thereby, it performs simple grammar learning. Under such a multimodal scheme, the robot is able to describe online a given physical context (both static and dynamic) through natural language expressions. It can also perform actions through verbal interactions with its human partner. -
岡田将吾・賀 小淵・小島 量・長谷川 修: "自己増殖型ニューラルネットワークを用いたヒューマノイドロボットの発達的言語獲得", 人工知能学会論文誌, Vol. 22, No. 5, pp. 493-507, (2007) [PDF]
ABSTRACT
This paper presents an unsupervised approach of integrating speech and visual information without using any prepared data. The approach enables a humanoid robot, Incremental Knowledge Robot 1 (IKR1), to learn word meanings. The approach is different from most existing approaches in that the robot learns online from audio-visual input, rather than from stationary data provided in advance. In addition, the robot is capable of learning incrementally, which is considered to be indispensable to lifelong learning. A noise-robust self-organized growing neural network is developed to represent the topological structure of unsupervised online data. We are also developing an active-learning mechanism, called "desire for knowledge", to let the robot select the object for which it possesses the least information for subsequent learning. Experimental results show that the approach raises the efficiency of the learning process. Based on audio and visual data, they construct a mental model for the robot, which forms a basis for constructing IKR1's inner world and builds a bridge connecting the learned concepts with current and past scenes. -
佐藤彰洋,賀 小淵,小倉和貴,長谷川 修, “人間との相互作用に基づくヒューマノイドロボット上の語順と挙動のオンライン学習”, 電子情報通信学会論文誌, D Vol.J91-D, No.8, pp.2045-2060 (2008) [PDF]
ABSTRACT
実環境においてロボットと人間が円滑なコミュニケーションを行うには,新しい言語獲得手法を開発する必要がある.本研究では,人間とのコミュニケーションを通じて動きの概念と文章の構造を獲得する手法を提案する.提案手法は自己増殖型ニューラルネットワーク(SOINN)とトップダウン処理,ボトムアップ処理を組み合わせることで,実環境から逐次的に得られる少数のデータを用いて単語の意味や文法構造,動きの概念を追加的に学習できる.更に動きを自身で生成したり,動きを言語によって説明することができる.実験により,提案手法がオンラインで与えられる少数の学習データから正しく言語の学習が行えることを示す.
-
Xiaoyuan He, Ryo Kojima and Osamu Hasegawa : "Developmental Word Grounding through A Growing Neural Network with A Humanoid Robot"
Video and Photo
HasegawaLab's Channel on Youtube![]()
HIRO
IKR1
Photo
 |
 |
 |
 |
実験用ヒューマノイドロボットの紹介
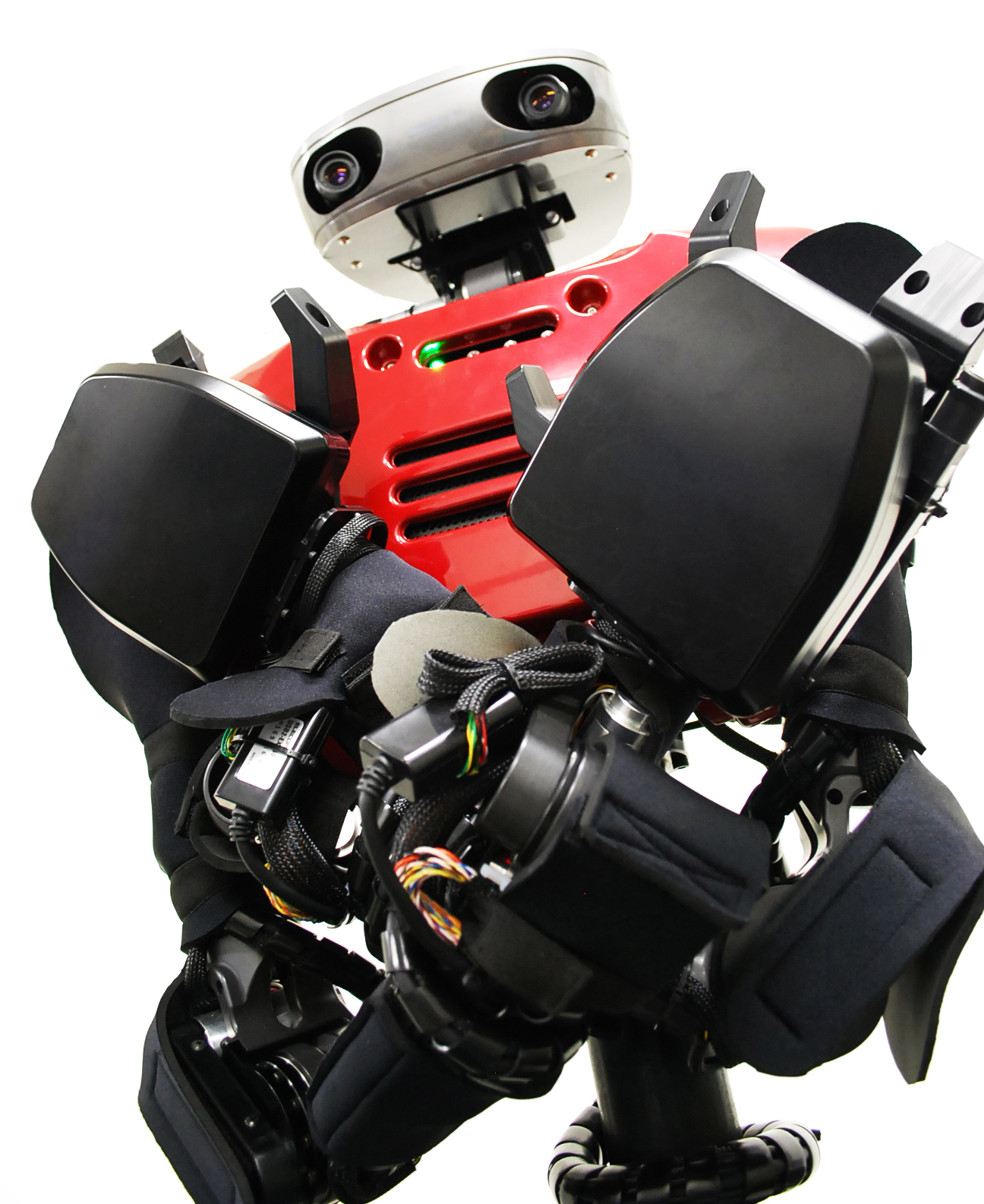
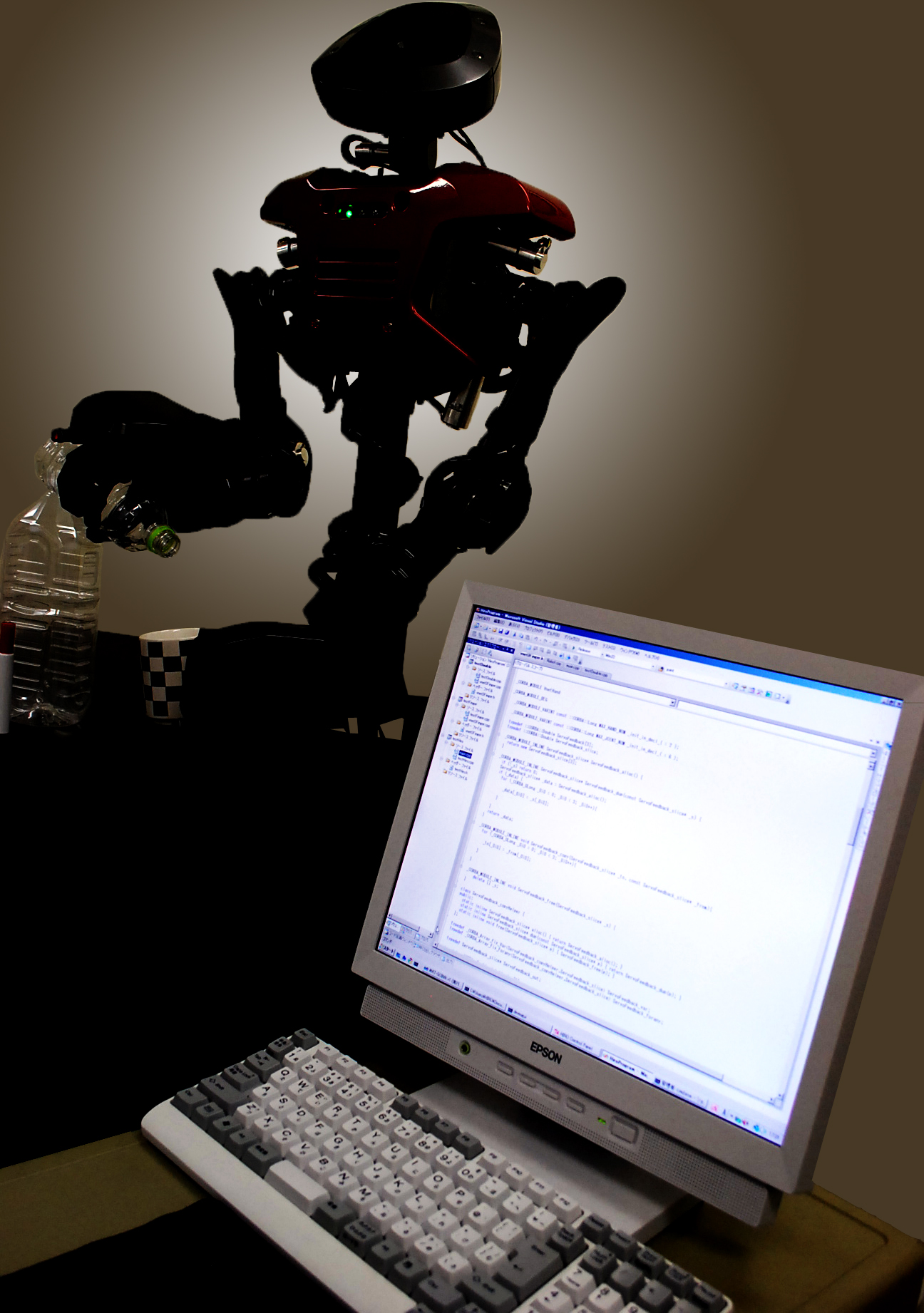
HIRO (Human Interactive RObot)
HIROとは川田工業株式会社![]() が開発した、人の動作範囲に近い、 ヒトサイズの上体ヒューマノイドロボットプラットフォームです。 両腕、両手、頭部カメラ、ハンドカメラ、マイク、スピーカーを搭載しており、人が手や腕を用いて行う動作や視覚、聴覚機能などを模擬することができます。 さらに、当研究室では、通常のHIROより高性能の東工大オリジナルハンドを搭載することで、より柔軟な把持動作が可能となっています(赤のハードカバーも東工大オリジナル仕様となっています)。 今まで使用していたIKR1やHOAP-3
が開発した、人の動作範囲に近い、 ヒトサイズの上体ヒューマノイドロボットプラットフォームです。 両腕、両手、頭部カメラ、ハンドカメラ、マイク、スピーカーを搭載しており、人が手や腕を用いて行う動作や視覚、聴覚機能などを模擬することができます。 さらに、当研究室では、通常のHIROより高性能の東工大オリジナルハンドを搭載することで、より柔軟な把持動作が可能となっています(赤のハードカバーも東工大オリジナル仕様となっています)。 今まで使用していたIKR1やHOAP-3 ![]() に代わり、現在はHIROを用いて、視覚、聴覚、推論を始めとするヒト知能の基盤機能に関するアルゴリズムの提案と、実世界での運用を目指した研究に取り組んでいます。
に代わり、現在はHIROを用いて、視覚、聴覚、推論を始めとするヒト知能の基盤機能に関するアルゴリズムの提案と、実世界での運用を目指した研究に取り組んでいます。